英文輪読第3回 5月6日
高橋
TOPへ戻る
'福島'訳
平均接触圧力pmは、圧子の負荷を接触面積で割った値で与えられ、実際の物理的な意味を持つ追加の長所があるパラメータの正常化に便利である。

接触面積はP2/3に比例し、その結果pmはP1/3に比例することが方程式6.1aから示すことができる。方程式6.1eを方程式6.1aを用いて置き換えると以下に示されます。
私たちは押し込み応力とa/Rを押し込み歪みとして平均接触圧力を参照しているかもしれない。私たちは押し込み歪みの定義を質問するかも知れない。しかしこの比率と試験片の大きさの中の弾性歪みから適切である。例えば、外部参照なしで、応力―歪み反応の存在の前兆となる量a/Rが自然界で従来から普通に定着している単軸引張と圧縮試験と同様ならば、違った半径の圧子が作る押し込みとの間の半径の違いを説明することはできない。両方の場合、完全弾性状態は線形反応を生じさせる。しかしながら局部集中した自然の応力場のため、押し込みによる応力―歪み関係は、一般に単軸引張と圧縮試験ができない材質試験の弾性―塑性特性について重要な情報が得られる。
TOPへ戻る
'伊藤'訳
6.2 弾性の固体との接触
次のセクションで、ヘルツ自身の分析は見直されています。それは、押し込みの変化(過程)と男性固体との接触の理解を獲得するためです。
以下の仮定は、分析を用意にするのに役立ちます。
1.接触体の曲率半径は接触の円の半径と比べて大きい。
この仮定で、私たちは各表面を扱うでしょう。それは、第5章で応力と変位に関する方程式が与えられている弾性の半空間としてです。
2.それぞれの物体の規模は接触円の半径と比べて大きい。
これは押し込みの応力と歪を考慮しています。それは、幾何学、接触(接続、添付)の方法、およびそれぞれの固体の境界から独立して生じるとかんがえられているためです。
3.接触体は摩擦がなく接触しています。すなわち、標準圧だけが圧子と試験片の間で伝えられます。
表6.1は考えられる表面での標準圧の分布をまとめています。
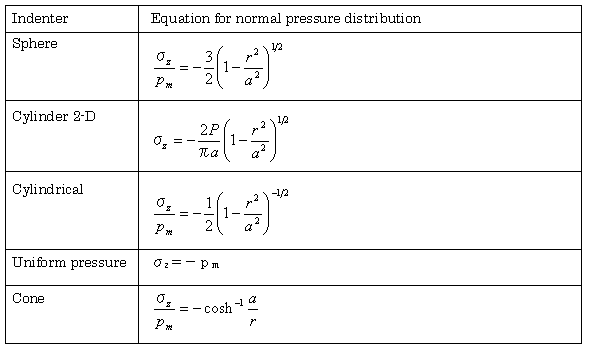
6.2.1 球状圧子
弾性係数E'で半径R'の円と、半径Rsの試験片で平らになっている表面でのポアソン比v'の円の接触を考える。これらの弾性係数はEとvとします。
荷重が全くかけられていなく、圧子がただ試験片に接触しているとき、試験片の表面と圧子の周辺との間の距離hは、半径方向距離rの関数として以下のよって与えられます。

ここで、Rとは圧子と試験片の相対曲率になります。

TOPへ戻る
'坂井'訳
今、図6.2.1aにおいて、荷重は、圧子の平らな表面にかかっている(Rsは式6.2.1=∞のとき)それによって、加重がかかっている点は垂直変位δだけ移動する。
この変位は、しばしば、"荷重点変位"と言われており、試料の遠点に関して測定されるとき、この変位は、圧子と試料の相互の接近の変位として考えられる。
一般に、圧子と試料両者の表面はひずみをうける。
これらのひずみは、uz',uzの値によってそれぞれ圧子と試料における接触円の内部の任意の点において、求めることができる。
図6.2.1aをみることによって、荷重点変位は以下の式で求めることができることがわかる。
もし圧子が完全剛体であるなら、そのときuz'=0であり(図6.2.1.参照)
剛体、非剛体の圧子であっても、r=0においてh=0であり、それゆえ、荷重点変位はδ=uz'+uzであたえられる。気をつけることとして、uz',uzまたhは、rの関数である。正確にこのこの関数uz(r)をもとめることはまだできていない。
ヘルツは表6.1で球における式によって与えられる形の圧力分布は結果として、試料表面(5章参照)の変位となり、以下の式で与えられる。

TOPへ戻る
'青柳'訳
変形後、接触面は二つの元の表面間にあり、二つの表面の相対曲率半径と二つの接触物の弾性に半径が依存する球の一部である。同じ弾性を持つ球状圧子と平面の接触といった特殊な場合では、接触面の曲率半径は圧子半径の2倍である。ヘルツの圧力分布は、圧子・試料双方の表面に等しく作用し、互いの表面上の点の偏位は式6.2.1dで示される。式6.2.1dを式6.2.1c のuz'、uzに代入し、6.2.1aを用いると、非剛体圧子と試料の接触といったよくある場合に対し、以下の式を得る。

ここでRは相対曲率半径である。式6.2.1eを少し変形し、r=aとおくと、ヘルツの式6.1aを得るのは簡単である。また、r=0とおくと、圧子・試料を含む2点間の距離δは

ここでkは式6.1bで示されている。式6.1aを式6.2.1fに代入すると、剛体・非剛体圧子双方に対する先ほどのδ、もしくは荷重点の変位を以下の式で得る。

TOPへ戻る
'広瀬'訳
圧子が完全剛体であるとき、k=9(1−v2)/16であり、相互距離δが式6.2.1dによって与えられる新たな試料自由表面下の侵入深さuz|r=0に等しい。式6.2.1dから剛体と非剛体は接触円の端の深さが(前文で述べた)表面下の侵入深さの合計の半分になる。すなわち、r=aのときのuzはr=0のときの uz.の2分の1となる。ジョンソンによると、私たちはE=9E/(16k)とし、以下の式のように定義できる。
式6.2.1fを書き直すと
Eの大きさはその系の有効弾性係数であり、圧子が剛体でなくなる(軟らかくなる)につれて小さくなる。それ故に、荷重Pが特定の値のとき、圧子の変形が原因によって非剛体の相互距離δは剛体の相互距離δよりも大きくなる。球状圧子のとき、式6.1aによりEの値が減少する(kの値が増加する)のに伴い、接触円の半径もまた増加し、それゆえに荷重Pが同じ値のとき、平均接触圧が減る。ハーツは二つの球が接触しているとき、接触表面の輪郭は、接触している物体間に介在する曲率半径の球でもあり、最大弾性係数を持つ物体にもとてもよく似ていることを示した。従って、図6.2.1aのように、平面と完全剛体圧子の大きいほうの半径Rの接触は、剛体圧子のとき式6.1aのkを使って計算することができる。このやり方で接触を考えるなら、等剛体圧子の荷重点変位は式6.2.1iではなく、r=0のときの式6.2.1dで与えられる。従って、接触円の半径をaとすると、等剛体圧子の半径は以下の式によって与えられる。
TOPへ戻る
'高橋'訳
等しい半径と同じ弾性係数の2つの球との接触の特殊なケースで、つまり等価剛体圧子半径Rは無限大のとき、接触表面の外形は直線であることに注意してください。(図621bを見てください)
最後に、球状圧子、平均接触圧力はPに比例することに注意する必要がある。
6 2 2 平面パンチ圧子
剛体円筒圧子に対応する圧力分布について、荷重と圧子の下にある試験片に相対的な表面Uzの変位の関係は次のようになる。

弾性圧子は、少量E*に関してEで置き換えられることに考慮すべきである。
剛体と非剛体圧子にとって接触円の半径は定数で、ゆえに荷重Pを与えるための平均接触圧力です。(その周辺の圧子の局部的変形を無視する。)
したがって、圧子の下の試験片表面上の点の変位は変わらない。
式622aでE=E*の場合、Uzは圧子と荷重Pが与える試験片との間の相互の距離です。
式622aで、試料片のそれに等しいEで、Uzは侵入深さです。
剛体圧子について、式622aのUzは図622から示されるように、侵入深さと相互の距離です。
したがって球状圧子の場合とは異なり、円筒パンチ圧子の侵入深さは、剛体と非剛体圧子はそれぞれ場合と同じ圧力分布から同じです。
最後に、円筒圧子について、平均接触圧力は接触半径aからの荷重に正比例し、定数です。
TOPへ戻る
TOPへ戻る
英文輪読トップページへ
新田研究室トップページへ